



1. Background
1.1 Orthoses and Exoskeletons
Traditionally, orthoses are external orthopedic devices used in rehabilitation to improve function of an upper or lower-limb body segment of individuals with musculoskeletal dysfunction. Specific purposes for its use may include one or more of the following; maintain or correct body segment alignment, injury protection, provide support, assist joint or resist joint motion during key phases of gait, relieve or distribute distal weight bearing forces aimed toward restoring mobility. One of the main goals of the orthotic device is to enhance functional independence of the patient following a debilitating injury or disease [1]. A higher order alternative in the use of therapeutic devices for individuals with neuromusculoskeletal disorders is based on exoskeleton technology. This can provide an alternative to traditional therapeutic devices used in standard care of a patient with gait deficiencies. These mechanical devices can include motorized and non-motorized versions. Figure 1 is a picture of an Indego exoskeleton device, which is a powered lower limb orthoses weighing about 11kg (26 lbs) and can accommodate people up to 113kg (250lbs) in bodyweight [2]. Although the Indego is awaiting FDA approval, the makers, Parker, has partnered with some of the world’s leading rehabilitation centers to demonstrate its benefits. Upon FDA approval, the company estimates the price tag for the Indego device will range from $69,500 to $100,000 [2].

The cost of robotic assistive-technology is a leading concern for the many potential users of exoskeleton mobility devices. An increase in worldwide sales of exoskeleton devices in rehabilitation centers surged following favorable clinical trials of these mainstream mobility devices in the US and Israel [3]. However, as exoskeleton development continues, the cost to purchase and maintain it as a personal device is too high [4]. This is more so if one considers the cost of current exoskeletons in use with price range from $70,000 to $150,000. Figure 2 is a picture of a ReWalk type exoskeleton. Presently, a purchase price for a ReWalk exoskeleton for personal use costs about $70,000 [4].The device, which is the first FDA approved robotic device weighs seven pounds and features two leg braces with motorized joints and motion sensors, a harness, and a backpack for holding the computer that controls the device and a battery that should last a good three-anda- half hour. In addition to giving paraplegics the ability to walk, this robotic device can be used to treat the health complications of those who cannot walk on their own, including digestive, cardiovascular, and circulatory issues. A redesigned model that fits only one user is expected to cost at least $65,000 [3]. The next generation of ReWalk will likely be lighter, less bulky about 80 pounds and may be comparable to Indego. The primary objective of the company is to reduce the cost of the exoskeleton device to as low as $30,000USD.

Another model of exoskeletons is the Japanese lightweight, HAL- 5 (Hybrid Assistive Limb). Built by Cyberdyne Inc., in Tsukuba, Japan, the HAL-5's structure consists of a frame made of nickel molybdenum and extra-super-duralumin. Duralumin is the trade name of some age-hardenable Al-Cu alloy system (2000 series) with manganese and magnesium as other main alloying constituents.At the inception of HAL in 2005, their cost was as exorbitant as ReWalk and Indego. It has since then undergone major modifications, including the incorporation of duralumin, resulting in a significant price reduction and is expected to cost $13, 800USD [5]. It is evident that the cost of an exoskeleton is exorbitant. There is need to reduce this unreasonable cost in order to increase affordability amongst socioeconomically challenged disabled individuals. The perceived health benefits to the use of exoskeletons have been frequently identified in current literature. However, the benefit of these robotic exoskeleton devices cannot be maximized due to the cost-effectiveness, which prevents adoption in many clinical rehabilitation settings; especially if economic barriers are addressed [4]. As expected, much of the research in this area has focused on the design and sensors for exoskeletons. Although the cost of exoskeletons can be reduced by addressing design and or sensor modifications and control system, here, the authors are focused on replacing duralumin with natural materials as a means of further reducing the cost of exoskeletons. A comprehensive analysis of potential natural materials such as fir, pine, oak and bamboo was carried out using the Ashby principles of materials selections. The property requirements were based on using the analysis of the energy expenditure for walking to identify the desired attribute profile and then correlating it with the properties of the current materials used for exoskeleton.
2. Methods
The goal of the study is to provide low-cost exoskeletons as an alternative for paralleled ambulation. It requires an understanding of the connection amongst the mechanics in normal gait and material properties. Therefore, a proper assessment of the viability of any material as a replacement material for exoskeleton design requires a comprehensive analysis of gait and material. Two types of analyses, kinematics of normal walking and material selection were conducted. First, the gait cycle kinematics of normal walking was analyzed in order to determine the minimum loading requirements for the replacement material. The information obtained provided the basis for the mechanical properties of the four natural construction materials, fir, pine, oak and bamboo used in this study.
2.1 Analysis I: Kinematics of Normal Walking
2.1.1 Biomechanics
Although walking is considered a simple straightforward activity, it is actually a complex series of coordinated movements innately defined by the proper functioning of the neuromusculoskeletal system for motor control of the body. When a person attempts to move, nerve signals are sent from the brain to the muscles through motoneurons, and based on the signals obtained, this moves the musculoskeletal system. In fact, a great deal is not understood about the physiology and biomechanics of human movement as it pertains to exoskeletons [6]. Primarily, the signaling of skeletal muscle activation and the organization of movement patterns required to propel the body forward as naturally as possible [7]. Considering the extensive research directed at addressing this essential function of human beings, key areas to understand in exoskeleton systems will entail addressing the metabolic cost of walking, especially the response of the material to the body, the energy expenditure required to walk, and the reaction forces experienced during the various phases of gait [8].
Normal gait cycle consists of a stance and swing phase (Figure 3), and is characteristically represented by 8 determinants (components or events). A gait cycle consists of 2 steps, one with the right foot and one with the left foot. The first 60% of the gait cycle (stance phase) is the period when the foot is in contact with the ground. It starts when the right foot makes contact with the ground and ends when the foot leaves the ground at toe-off. The remaining 40% is defined as the swing phase and represents the period when the limb is not in contact with the ground [7]. Although the stance phase has five components, it can be divided into three parts: 1st rocker, which consists of initial contact and load response. During this phase the heel contacts the ground and the ankle plantar flexes until the forefoot is in contact with the ground. When the forefoot has made contact, the 2nd rocker begins. This consists of ankle dorsiflexion as the tibia moves from behind the foot through mid-stance to in front of the foot. The 3rd rocker starts as the heel lifts off the floor, causing dorsiflexion at the metatarsophalangeal joints (ball of the foot) and continues through the propulsive phase until the big toe leave the ground at toe off (Figure 3). The big toe leaving the floor marks the end of the stance phase of the gait cycle.

2.1.2 Energy expenditure and loading requirement
Consideration of the energetics during normal human walking shows that the major joints of the lower limb rotate to advance the body forward while providing for weight-bearing support against external torques imposed by gravity. The major joints in the lower limb are the hip, knee and ankle, with the knee and ankle requiring greater sagittal plane neuromuscular control during the stance phase [9]. This biomechanical link between the knee and ankle can increase or decrease the internal and external forces imposed on the body. It helps to efficiently translate the body center of mass (CoM) throughout the gait cycle [10]. The positions of the lower extremity joints determine the location of body CoM, leading to a natural cyclic-sinusoidal displacement (up-down and sideways motion) of the body’s center of mass (CoM) during walking [7].
Gottschall and Kram estimated that leg swing could account for only about 10% of the net metabolic rate during human walking [11]. The researchers hypothesized that adding additional mass to the extremities would result in metabolic rate increases with load applied at a more distal location. This will disproportionately change the distribution of mass thereby altering the moment of inertia required to move the leg (extremity) forward. A study conducted by Browning et al., proposed that any increase in net metabolic rate with leg loading would be associated with greater net muscle moments during late stance and swing phase of gait [12]. These disproportionate changes in mass presumably will lead to alterations in the normal biomechanical determinants of walking to include variations in stride-length and stance phase periods compared to normal walking.
The energetics and kinematical characteristics of gait has been well investigated in the literature. A basic principle governing gait is the translation of the body CoM to propel the body forward while simultaneously optimizing the vertical and medial-lateral displacements of the body’s CoM for efficiency of whole body joint kinematics [7]. Thus, the effects of inertial loading and mass distribution have to work in harmony with the physiology and biomechanics of human movement. Therefore, in the case of lowerextremity ambulatory devices (orthotics, prosthetic legs, or powered leg exoskeletons), the location of the center of mass should be considered [12] in the design of these devices. Changes in lowerextremity kinematics during walking may depend on the location of the added load since adding a modest mass to the shank or foot, dramatically increases the metabolic rate during walking. This increase in metabolic demand becomes necessary for maintenance of the center of mass, support of body weight, and forward propulsion to swinging the legs during walking [13]. The sinusoidal displacement occurring during walking consumes valuable energy toward maintaining the body’s CoM throughout the gait cycle [14]. It is important to recognize that the summation of the angular rotation of the joints allow transfer of the body weight from left to right of the lower extremities [9]. Figure 4a is a schematic showing the eight events and the corresponding percentages covered at that instance during the gait cycle. It also defines the periods of single-limb and double-limb support of the gait cycle illustrating the percentage of time each event serves to support the weight of the body. Figure 4b represents a cyclic-sinusoidal displacement of the CoM, which can be used to assess the amount of potential energy during a gait cycle. It shows that in normal walking, the maximum potential energy is attained when the CoM reaches the highest points, which correspond to 30% and 80% of the gait cycle (Figure 4b). A comparison of Figures 4a and 4b clearly indicates that maximum potential energy occurs at mid-stance (30%) and mid swing (80%). The forces involved in producing the movements necessary for walking is usually calculated from ground-reaction forces (GRF) that are mapped upwards through lower limbs and joints [14]. Although these forces peak twice (at 30% and 80%) in the gait cycle, maximum loading on the lower extremity joints occur during mid-stance, when the tibia is perpendicular to the ground [7,15]. In mid-stance (single-limb support), the load is concentrated on the knee joint.

Browning et al. [12] have shown that the net metabolic rate (energetics) for walking increases with distal load added to the lower extremities. The authors conclude that adding mass to the extremities increases the metabolic rate disproportionately to the load [12]. Subsequently, the added lower extremity load increases the moment of inertia about the swing leg at the hip joint, increasing the musculature activity at the pelvis on the supporting single-stance extremity. Here, the hip abduction moment of the stance extremity would be greatest while supporting the pelvis. As we hypothesized, in order for a material to be used as an exoskeleton, it must have enough strength to support the weight of the body at mid-stance, where the load requirement is maximum. In this regard, it has been reported that the weight of a human leg is about 10% of a person’s total weight [12]. Given that the average weight of male and female in the United States are 80kg (800 N) and 69kg (700 N), respectively, it is reasonable to assume that the replacement material must provide minimal support for 70 N to 80 N to ensure adequate body weight acceptance [12] thereby the human weight can be transferred through the exoskeleton directly to the ground. As aforementioned in the previous section, exoskeletons must act in parallel with the physiology and biomechanics of the human lower limb for load transfer to the ground. Additionally, ground reaction impact are lessened while meeting the overall energetic demand by storing substantial quantities of energy when striking the ground to stabilize movement. Part of our future work will focus on a detailed analysis of the reaction forces imposed on the lower extremity, as this is necessary to understand how the energetics and biomechanics of walking will be affected.
2.2 Analysis II: Materials Selection
Selection of materials involves exploring the best match between design requirements of the components and the properties of the possible materials. The selection strategy used in this study is based on Ashby’s standard procedure that has been adopted for material selection [16]. It is centered on establishing the link between material and the required function. This is classified into four main steps (Figure 5) of translating a design requirement, screening of materials, ranking of materials and then documentation. In general, the design requirement is expressed as four parameters, which are used to define the boundary conditions for selecting a material. The four parameters are (a) the functions of the component, (b) the constraints the design imposes on the choice of material, (c) the objective of the designer and (d) the free variables. It is important to note that while constraints set property limits, the objectives define the material indices that are used to rank the selected materials. The actual analysis consists of screening, which selects the probable materials while it eliminates the candidates that cannot perform the required functions. Materials are eliminated if one or more of their attributes are outside the limits set by the boundary conditions. Once the possible candidates have been identified, they are ranked using an optimization criteria based on the material indices developed.

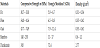
Table 1 summarizes the design requirements used in the selection of natural materials for exoskeletons and orthoses. The objective functions can either be beam or column if used for exoskeleton or orthoses, respectively. The prevailing constraint is that it must be at least 10% of a person’s total weight.

This is a problem with one main objective, which is to minimize cost. However, there are three main constraints, namely maximum strength, with no buckling and no fracture. The cost C of the column is its mass, m, times the cost per unit kg, Cm, of the material, and this is given as:
Where Lis the desired length and ρ is the density of the material in kg/m3. Unlike properties such as strength and modulus, which do not change with time, cost does change due to supply, scarcity and inflation. Costs for most materials are tabulated in daily papers and trade journals. The material indices, which take into consideration the function, objectives and constraints for this particular problem can be classifies into two:
(a) When treated as column, minimum cost and buckling load prescribed, the Index is given as:
(b) When treated as a beam, minimum cost and strength is prescribe, the Index is given as:
3. Results and Discussion
In spite of the fluctuation in the cost of materials, there are useful
charts serving as guides for the selection of materials using “function
per unit cost” as a criterion [16]. Based on Equations in (a) and (b),
the materials to be selected must be in the subset of materials with
high values of

Further analysis was carried out on the materials using Granta CES Selector software. Property comparison between Duralumin and the four natural materials are presented in Figure 7. In order to explore these materials in depth, the data of specific Duralumin alloy, wrought Al-2024 (T6) was compared with each of the natural material. It is evident that all the natural materials have the potential to replace Duralumin as they are all above the guideline. The choice was reduced significantly when the toughness requirement was considered. Fur, oak and pine were eliminated because of low toughness and as such leaving bamboo as the only viable natural material.
4. Conclusion
The study was focused on assessing four natural materials with the hope of replacing Duralumin, the current material used in exoskeleton design. Although the four materials satisfied the yield strength requirements only bamboo can be used as replacement material for duralumin.Additional characteristics of bending and toughness make bamboo a more favorable replacement material for the design of exoskeleton.
Competing Interests
The authors declare that they have no competing interests.
Author Contributions
Kischa S. Reed: Acquisition and data Analysis I, and drafting the
manuscript.
Peter N. Kalu: Acquisition and data Analysis II, drafting and
revising manuscript.
Acknowledgement
The authors would like to acknowledgement Professor Tony Rollett of CMU for making available the Granta software system used in this work.
References
- Dellon B, Matsuoka Y (2007) Prosthetics, exoskeletons, and rehabilitation [Grand challenges of robotics]. IEEE Robot Autom Mag 14: 30-34 [CrossRef] [Google Scholar]
- Ferrati F, Bortoletto R, Menegatti E, Pagello E (2013) Socio-economic impact of medical lower-limb exoskeletons, IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO) Shibaura Institute of Technology 19 - 26 [CrossRef] [Google Scholar]
- ReWalk Robotics (2014) ReWalk-Rehabilitation
- Wolff J, Parker C, Borisoff J, Mortenson WB, Mattie J (2014) A survey of stakeholder perspectives on exoskeleton technology. J Neuroeng Rehabil 11: 169 [CrossRef] [Google Scholar] [PubMed]
- Guizzo E, Goldstein H (2005) The rise of the body bots [robotic exoskeletons]. IEEE Spectr 42: 10 [CrossRef] [Google Scholar]
- Ferris DP, Sawicki GS, Daley MA (2007) A Physiologist's Perspective on Robotic Exoskeletons for Human Locomotion. Int J HR 4: 507-528 [CrossRef] [Google Scholar] [PubMed]
- Neumann DA (2010) Kinesiology of the Musculoskeletal System: Foundations for Rehabilitation. (2nd edition), St. Louis: Missouri, Mosby, USA 627- 681
- Dollar AM, Herr H (2008) Lower extremity exoskeletons and active orthoses: Challenges and state-of-the-art. IEEE Trans Robot 24:144-158 [Google Scholar]
- Waters RL, Mulroy S (1999) The energy expenditure of normal and pathologic gait. Gait Posture 9: 207-231 [CrossRef] [Google Scholar] [PubMed]
- Sant’Anna A, Wickström N, Zügner R, Tranberg R (2012) A wearable gait analysis system using inertial sensors Part II?: Evaluation in a clinical setting. BIOSIGNALS 2012 - Proc Int Conf Bio-Inspired Syst Signal Process: 5-14 [Google Scholar]
- Gottschall JS1, Kram R (2005) Energy cost and muscular activity required for leg swing during walking. J Appl Physiol (1985) 99: 23-30 [CrossRef] [Google Scholar] [PubMed]
- Browning RC, Modica JR, Kram R, Goswami A (2007) The effects of adding mass to the legs on the energetics and biomechanics of walking. Med Sci Sports Exerc 39: 515-525 [CrossRef] [Google Scholar] [PubMed]
- Bianchi L, Angelini D, Lacquaniti F (1998) Individual characteristics of human walking mechanics. Pflugers Arch 436: 343-356 [CrossRef] [Google Scholar] [PubMed]
- Burdett RG, Skrinar GS, Simon SR (1983) Comparison of mechanical work and metabolic energy consumption during normal gait. J Orthop Res 1: 63-72 [CrossRef] [Google Scholar] [PubMed]
- Gottschall JS, Kram R (2003) Energy cost and muscular activity required for propulsion during walking. J Appl Physiol (1985) 94: 1766-1772 [CrossRef] [Google Scholar] [PubMed]
- Ashby MF (2011) Materials Selection in Mechanical Design. (4th edition), Elsevier Science 219 - 222 [Google Scholar]
- Chung KF, Yu WK. (2002) Mechanical properties of structural bamboo for bamboo scaffoldings. Eng Struct 24: 429-442 [CrossRef] [Google Scholar]
- Gezer H, Aydemir B (2010) The effect of the wrapped carbon fiber reinforced polymer material on fir and pine woods. Mater Des 31: 3564-3567 [CrossRef] [Google Scholar]