


1. Introduction
In last two decades, consensus control of multi-agent systems has been researched deeply and extensively, for its broad range of applications in several areas, such as: robotic teams cooperation, sensor networks, air vehicles formation flying, social networks and so on [20-24]. And it has attracted the attention from several fields including but not limited to engineering, biology, control theory and computer science.
For consensus problems, abundant achievements for first-order agents have been acquired by previous researchers [1-4]. The study of the multi-agent systems was from undirected graph to directed graph, from fixed communication topology to switched topology, and with time-delay or not. However, under real circumstances, the transmission errors, communication obstacles, actuator bias and other disturbances do exist. From now on, several researchers had investigated the disturbance rejection performance of multi-agent systems in different perspectives. P. Lin [5,6] firstly introduced H∞ control theory to multi-agent systems. In his work, An orthogonal transformation was utilized to guarantee the validity of H∞ control theory. And Y. Liu [7] investigated multi-agent systems of high-order integrator and general linear time-invariant dynamics by H∞ criterion. Consensus protocols involving a coefficient were raised by Z. Li and Y. Zhao [9,10], and the H∞ performance for both state feedback controlled systems and output feedback controlled systems was investigated by introducing H∞ performance region of the coefficient. It is worthy mentioning that the authors in [9,29] addressed H∞ and H2 consensus problems of linear multi-agent systems and proposed algorithms to satisfy the H∞ and H2 conditions separately. Y. Cui [8] employed L2 − L∞ theory to solve the peak bounded consensus problems of high-order multi-agent systems with external disturbances and parameter perturbations. In other perspectives, stochastic theory and probability limit theory were introduced to consensus problems of multi-agent systems [11,12], in both continuous-time and discretetime case. V. Gupta [13] and Y. Jia [15] considered the LQG problems of networks of dynamical agents. When the systems are disturbed by Gaussian noises, the designs were synthesized under H2 criteria for robust [25,26,31]. On another aspect of H2 control, the recent paper [30] studied guaranteed cost problem for multi-agent systems with actuator faults and uncertainty.
In last century, numerous results were obtained in H2/H∞ control. DS. Bernstein [14] proposed a LQG performance approach with an H∞ performance bound based on the solutions of three coupled Riccati equations. PP Khargonekar [16] simplified it to a convex suboptimization problem. D. Arzelier [15] gave a sufficient condition in the form of bilinear matrix inequalities (BMIs) to reduce the conservatism, and solved this non-convex problem by a numerical iterative algorithm. C. Scherer [27] considered the more universal case where the channels of the disturbance inputs and controlled outputs are different, when different performance indexes are concerned. However, H2 performance and H∞ performance have never been considered together in multi-agent systems.
In this paper, consensus problems of single-integrator multi-agent systems with fixed directed interaction topology will be studied. We address the consensus performance subject to external L2 disturbances and Guassian white noises by combining H∞ theory and H2 theory. Our objective is to search the linear feedback controller, based on relative states of its neighbors, to optimize the H2 performance of the multiagent systems, under two constraints. One is that the multi-agent systems reach asymptotically consensus with the absence of external signals, and the other is the constraint of H∞ performance against both energy bounded disturbances and actuator uncertainties. Firstly, we will present the algorithms to design the satisfactory controller, rather than proposing a theorem to verify the protocol is valid or not. Secondly, different from other work, the feedback gain matrices of the multi-agent systems are Laplacian matrices with a fixed graphical structure constraint, which has more complicated relationship between the entries. We transform it to an optimization problem in a set of diagonal matrix. To measure the consensus H2 performance, a novel output function is defined, which is linked to the LQR problem of linear-consensus. After a procedure of model transformation to guarantee the validity of H∞ theory, an original elimination lemma is derived. By using this lemma, the problem is simplified to a numerically solvable BMI constrained optimization problem on diagonal matrices. Finally, a previously proposed iterative method is used to solve the BMI optimizaiton problem.
The paper is organized as follows. In section 2, some basic frameworks of graph theory and H2/H∞ control are introduced. H2/H∞ consensus problem for first-order directed network is described in section 3. Section 4 gives the main results and the approaches to solving the H2/H∞ consensus problem. In section 5, numerical simulations are presented to verify our results. Finally, conclusions are drawn in section 6.
1.1 Notations
In this paper, In represents the identity matrix with n dimensions, and In represents n-dimension column vector [1,1,...,1]T . Denote sym(A) = A +AT , for a square matrix A. And diag{m1,m2,...,mn} is the diagonal matrix whose diagonal entries are given by m1,m2,...,mn. For a n-order digraph, Ln denotes the set of all n-dimensional Laplacian matrices of the graph. And for a digraph with m edges, Dm denotes the set of all m-dimensional positive definite diagonal matrices. L2[0,∞) represents the space of square integrable vector functions over [0,∞).
2. Preliminaries
2.1 Graph theory
Let G = (ν,ε,A) be a weighted directed graph of n orders, which
consists of a set of nodes V= {v1,v2,...,vn}, a set of edges ε
The Lapliacan matrix Σ of a graph is defined as L= [lij]m×n, where
2.2 H2 and H∞ Theory
Consider the strictly proper system Tzw which yields to the following dynamics:
where A is a stable matrix.
Lemma 1
(Y. Jia [19]) The L2 norm of strict proper system (1) satisfies
Lemma 2
(Y. Jia [19]) Consider the system (1), the necessary and sufficient
condition for
2.3 Linear algebra
Lemma 3
(P. Lin et al. [5]) For matrix
and an arbitrary n-order Laplacian matrix L, there exists an orthogonal
matrix
Lemma 4
(CE. De Souza et al. [28]) Assume that D and E are real matrices with compatible dimensions. For an arbitrary scalar ε, we can get
Lemma 5
(Schur complement) Given a symmetric matrix S Є Rn×n
decomposed as
where S11 Є Rn×n, S12 Є R(n-r)×n and S22 Є R(n-r)×(n-r). Then S<0 if and
only if S11<0 and
3. Problem Formulation
In [26,32], multi-UAVs (unmanned aerial vehicles) and satellite formations were supposed to disturbed by zero-mean Gaussian white noise. However, mathematically saying, the statistical characteristics of stochastic process may vary according to the information we have. In other words, the zero mean condition can not be guaranteed all the time. So we consider the singleintegrator multi-agent systems with identical dynamics, which are driven by energy bounded disturbances and white Gaussian noises.
where xi(t) is the state of the ith agent, w∞i(t) Є L2[0,∞) is the energy bounded disturbance, and w (t) is the standard white Gaussian noise.
We propose the following protocol based on the states of neighbors to achieve consensus. However, multi-agent systems are always in the face of calculation errors and variations of communication circumstances. Different from other consensus scheme, the communication perturbation is reflected on the multiplicative uncertainty of weight elements, so H∞ theory can be utilized.
where aij is the parameter to be determined and ψij(t) is unknown multiplicative uncertainty of aij with
In our work, the communication topology of the network is fixed and known. For example, it is like the layout of submarine optical cables and sensor networks, or some social relationship, in which the interaction topologies will not be changed over a period of time. Our objective is to find an optimal protocol to make the closed-loop system possess a desired level of disturbance rejection. For the H∞ performance, on the one hand, the controlled output z∞i(t) is present to value the difference between its state and the average state of all agents.
On the other hand, we expect that there is a tradeoff between the better system performance and the lower energy consumption. To consider the H2 performance of the multi-agent system, a novel controlled output is given.
where qij > 0 corresponding to an undirected complete graph and
ri > 0 are H2 performance coefficients. On the one hand, denoting
By utilizing protocol (7), the closed-loop dynamics of whole multiagent system can be written as
where B = diag{b1, . . . , bn}, and C is defined in equation (4).
Problem 1
Given an H∞ level γ, determine a Laplacian matrix L of the fixed interconnection of the multi-agent system (6) with multiplicative weight uncertainty satisfying (8), such that
under
- the closed-loop multi-agent system (11) achieves asymptotically consensus for arbitrary ψij(t) satisfied (8) with the absence of w∞(t) and w0(t) and the arbitrary initial states x(0).
-
Lemma 6
(W. Ren and RW. Beard [4]) The Laplacian matrix L of a directed graph G has a single zero eigenvalue (with eigenvector 1n) if and only if the graph G contains a spanning tree. Moreover, other eigenvalues of L are strictly positive in this case.
In order to satisfy the first condition of Problem 1, it is a necessary condition in our work that the directed network of the multi-agent system contains a spanning tree.
Lemma 7
(P. Lin et al. [5]) Consider a directed graph G. Let E = [eij] and F = [fij] be the 01-matrix. The rows and columns of E are indexed by the nodes and edges, while the columns and rows of F are indexed by the nodes and edges. eij = 1 if the vertex i is the tail of the edge j, eij = 0 otherwise. And fij = 1 if the vertex j is the head of the edge i, fij = 0 otherwise. Let weight matrix W = diag{w1,w2, . . . ,w|ε|}, where wp (p = 1, . . . , |ε|) is the weight of the pth edge of G and |ε| is the number of the edges. Then the relationship of the Laplacian matrix can be obtained L = EWD, where D = ET − F.
4. Main Results
In this section, some main results of this paper are presented.
4.1 Model Transformation
Because of the singularity of the system matrix −(L + ΔL), which leads to H2/H∞ theory invalid, some model transformations need to be conducted.
Remark 1
Although w∞(t) is a deterministic function with bounded norm
while w0(t) is a random signal, sharing a common integral operator
Then we can obtain that
Consider the H2 and H∞ performance
Lemma 8
The following conditions are equivalent:
- The protocol (7) can solve the Problem 1.
-
For a multi-agent system with digraph which contains a spanning
tree, there exist symmetric positive definite matrices
Problem 2
under
And the cost function J is the Laplacian matrix L.
Proof Equation (16) can be obtained readily by the definition of L2 norm in Lemma 1. And the H∞ constraint can be transformed into inequlity (17) referred to [19].
4.2 Conditions for H2/H∞ Consensus
Lemma 9
(Elimination lemma)
Then, there exists a matrix
if and only if
Proof Necessity can be obtained noticeably. Next, we use a
constructive approach to prove the sufficiency. A full column rank
matrix
holds. According to the block of V , we assume that
and obtain that
Substituting equations (21) and (22) into inequation (20) so that it can be rewritten as
By Schur complement lemma, inequation (23) holds if and only if H11 < 0 and
H11 < 0 is obtained by condition (19) and it is obvious that for
matrix
To simplify the conditions of optimization Problem 2, the following notations are stated:
Theorem 1
Assume the directed graph of multi-agent system (6) contains a spanning tree, distribute H2/H∞ synthesis problem can be transformed to the following non-convex constraint optimization problem:
Problem 3
If there exist symmetric positive definite matrices X∞, X2, matrices K21, K∞1, K∞2, K∞3, diagonal matrices Y , Z, F2, F∞ and a positive scalar μ, such that
under
It provides a sub-optimal solution to the H2/H∞ consensus problem
and the upper bound
At the optimum, the sub-optimal weight matrix can be given by
Proof By Lemma 4, the following inequality can be obtained for an arbitrary scalar μ > 0
By Lemma 5, the H∞ condition
Substitute L(X∞) and N(X2) into the constraint (16) and (17). Then the H2/H∞ synthesis problem can be rewritten as
Problem 4
under
It indicates that the feasible region of W of Problem 4 is contained
in the feasible region of Problem 2 by inequality (29). And we can
readily get that
Using Lemma 9 to slack some slack variables, we can obtain that Problem 4 equals to
under
where F22, F∞4 Є D|ε| are positive definite diagonal matrices and other slack variables are real matrix with compatible dimensions. State that
Since matrices Y , Z, F2 and F∞ are diagonal matrices with equality relationship (26), Problem 3 is obtained and Theorem 1 is proofed.
Remark 2
However, because of the nonlinear equational constraint (26), it is hard to utilize a numerical procedure to solve the constrained optimization Problem 3. We relax it by assuming that
Then we solve the following BMI constrained optimization problem
Problem 5
If there exist symmetric positive definite matrices X∞, X2, matrices K2, K∞1, K∞2, K∞3, diagonal matrices Z, F and a positive scalar μ solution of the optimization problem:
under
to get an upper bound on the L2 norm
A coordinate-descent based iterative procedure similar to [15] is used to solve the BML optimal problem.
4.3 Numerical Algorithm Description
Algorithm 1
- Step 1: For a directed graph G which contains a spanning tree, choose the initial matrices K2 = K∞1 = W0DU1 and K∞2 = K∞3 = 0, where W0 is an appropriate matrix with all eigenvalues positive.
-
Step 2k: Pick the optimal solution matrices K2, K∞1, K∞2
corresponding to the minimum situation in the last step. Then
solve the optimization linear matrix inequality (LMI) problem
-
Step 2k+1: Pick the diagonal optimal solution matrices
Z, F corresponding to the minimum situation in the last
step. Then solve the convex optimization LMI problem
-
Final step: If β2k −β2k+1 < ε, then stop. The sub-optimal weight
matrix of the digraph of the first-order multi-agent system is
Remark 3
From the description of the algorithm, it can be guaranteed that the target function will not increase at each iteration. It still will be a challenge task to proof the global convergency mathematically. However it has turned out effective in simulation and practice by choosing an appropriate initial value in the step 1 of Algorithm 1.
5. Numerical simulations
Consider a first-order multi-agent system with 5 agents. Their
communication connection relationships are as Figure 1. Then
we design a Laplacian matrix to solve the H2/H∞ sub-optimization
problem. In other words, the weight of each edge need to be
determined. By using Remark 2 and Algorithm 1, setting γ = 1, ε =
0.01 and

It is revealed from Figure 2 that the 5 agents can achieve consensus
with good performance against Guassian white noises. And H∞
performance is illustrated where w∞i are sinusoidal disturbances in
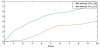
Figure 3. Figure 4 reveals the trajectory of the sum of the impulse
response energy of z0, which is equivalent to the L2 norm of the closedloop
system


Compared with [5], our work goes a step further, not only because
of the design of the Laplacian matrix we proposed, but also the
consideration of H2 performance. Using H∞ approach in [5], assuming
that the weight of each edge in graph 1 is equivalent, we can verify
that the below equation; minimizes the L2 norm of system (6) with

Two extra examples are provided for comparison. The topologies
of multiagent systems are shown in Figure 6 and Figure 7. H2
performance results achieved by H2/H∞ approach and H∞ approach
are illustrated by Table. 1, which indicates that H2/H∞ approach can
achieve a better robust H2 performance compared with H∞ approach
with



6. Conclusion
This paper has studied the disturbance rejection problem of first-order multiagent system consensus with directed interaction topology. L2 norm and H∞ norm were utilized to measure the system consensus performance. Under the premise of satisfying given H∞ performance, a new type of measure output contained more generality was proposed, and a relaxation approach with lower conservatism was presented to search the sub-optimal solution of the H2/H∞. Notably, a novel elimination lemma was obtained. In future work, high-order multi-agent systems with parameter uncertain and time-delay will be considered. For these cases, measurement errors caused by noises and higher conservatism caused by the larger number of the agents will also be the challenges to overcome.
Competing Interests
The authors declare that they have no competing interests.
Acknowledgments
This work was supported by the NSFC (61520106010, 61327807, 61521091, 61134005) and the National Basic Research Program of China (973 Program: 2012CB821200, 2012CB821201).