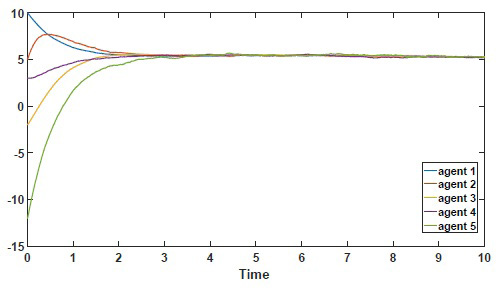
Figure 2:
The state trajectories of the agents with Gaussian noises.