


1. Introduction
Wireless communication systems have been gradually evolved since the launch of the first generation digital wireless communication system. Network throughput of wireless communication systems has been raised along with the evolution. To provide users with high speed communication links, many techniques have been applied, for instance, adaptive modulation and coding (AMC), orthogonal frequency division multiplexing (OFDM), user scheduling, multiple input and multiple output (MIMO). Especially, MIMO is a key technology to increase the network throughput. MIMO techniques have been intensively investigated since the potential of MIMO was revealed [1]. While single user MIMO has been commercialized, multiuser MIMO has also been considered and been standardized in the IEEE 801.11ac, because multiuser MIMO can enhance network throughput in wireless communication systems only if many transmit antennas are put on a base station or an access point. Multiuser MIMO systems usually employ precoding in downlinks to order to avoid harmful interuser interference at user terminals. Precoding based on linear signal processing, so called “linear precoding”, has been proposed [2,3]. Besides, non-linear precoding has also been proposed [4-7]. Non-linear precoding attains better transmission performance than linear precoding [8], whereas non-linear precoding is more complicated than linear precoding. Although multiuser MIMO allows several user terminals to simultaneously communicate with an access point, the number of the accessible user terminals is limited. Multiuser MIMO has to select user terminals among all user terminals surrounding an access point. Because transmission performance greatly depends on channel condition between user terminals and an access point, user terminal selection techniques for linear precoding have been investigated [9-11]. User selection techniques for non-linear precoding such as Tomlinson-Harashima precoding (THP) [12-14] also have been investigated, because the THP can be implemented with relatively lower complexity than the other non-liner precoding. For example, user selection techniques to maximize throughput have been investigated [12,14]. Where the water filling is used in conjunction with the THP. Even when nonlinear precoding is utilized, a user selection technique for a linear precoding has been shown to be useful [13].
This paper proposes novel user selection techniques for the THP based on the minimum mean square error (MMSE) criterion with ordering. The THP based on the MMSE equalizes the signal to noise power ratio (SNR) of the received signals at all the user terminals. By taking advantage of the characteristic, the proposed user selection finds the a set of the user terminals that maximizes the SNR of all the received signals, which results in throughput enhancement. Because the proposed user selection techniques make use of an intermediate values in obtaining the precoder weights, the proposed user selection techniques only need a small amount of additional calculations. However, the proposed user terminal selection employs exhaustive search to find the best user terminal set. This paper proposes further low complexity user selection techniques that select user terminal successfully based on the user selection criterion used in the above proposed techniques, which mitigates the high computational complexity caused by the exhaustive search. Next section describes a system model, and the proposed user selection techniques are explained in Sec. III. Sec. IV evaluates the performance of the proposed techniques in terms of the transmission performance and the complexity. Concluding remarks are presented in Sec. V.
Throughout the paper, (A)-1, diag [V], superscript T, and superscript
H denote an inverse matrix of a matrix A, a diagonal matrix with a
vector V in the diagonal position, transpose, and Hermitian transpose
of a matrix or a vector, respectively. tr [A] denotes a trace of a matrix
A, i.e., a sum of the diagonal elements of the matrix A. E[β], ℜ
2. System Model
2.1 Multiuser Environment
We assume a wireless network where an access point with NAP
antennas is surrounded by NU terminals. Only an antenna is placed
on the terminal. The access point has packets to send to all the
terminals. The channel state information (CSI) between the access
point and all the user terminals is assumed to be known at the access
point1. The access point sends the packets to the some user terminals
simultaneously by utilizing MU-MIMO precoding, because MUMIMO
precoding can prevent harmful multiuser interference from
deteriorating the transmission performance at the user terminals. Let
1Access points are informed the CSI by explicit feedback in the uplink or implicit feedback in systems with time division duplexing.
where
where H denotes a composite channel matrix defined as,
While the system model defined in (2) looks like only the NAP terminals receiving the signals, actually, the NU user terminals wait for the opportunity to receive the signals from the access point. Hence, NU >> NAP, This system model is illustrated in Figure 1. The access point has to select the |NAP user terminals among the NU user terminals. Because wireless channels are changed as time goes by, in principle, the selected user terminal set could be changed packet by packet. Because the signals are transmitted to only the users with which the THP achieves better performance, the average transmission performance of all the user terminals is expected to improve by the user terminal selection.

2.2 Tomlinson harashima precoding based on MMSE
It is demanded to provide user terminals with same quality services
from the view point of fairness. In other words, the transmission
performance should be equal among all the user terminals. For the
purpose, we apply the THP based on the MMSE with the ordered
Cholesky factorization [15]. When the THP is applied, the
transmission signal vector
In (4),
The feedback filter is obtained as follows. First of all, the error covariance matrix Φ is defined as,
where j and M[a,Md] represent the imaginary unit and a modulo function for a real number defined as,
In the above equation, a ε R and
Because the THP includes the modulo function, the THP is classified into non-linear precoding. The modulo function plays an important role in performance improvement of the THP. The modulo function makes user selection techniques for the THP differ from that for linear precoding.
In the following section, our proposed user selection techniques for the THP based on the MMSE with Cholesky factorization is described and the performances are compared.
3. User Selection for THP
We assume that n user terminals are selected among the NU user
terminals. Since the number of the combinations is
In the following, we describe user selection technique to choose the set sn to maximize the performance in terms of the transmission performance and the complexity.
3.1 Normalization factor based user selection (NUS)
When the signals are transmitted with the THP for the selected user
terminals in the set
In (14),
where
Low complexity user selection techniques are proposed in the following sections.
3.2 Diagonal matrix based user selection (DUS)
As is described in the previous section, the user terminal set that
maximizes the amplitude
The matrix
2Power of the modulation signals is normalized to one. Because the first feedback filter
output signal v(1) is identical to the input signal, the (1,1) entry of the matrix
By substituting the matrix
In (18),
The technique proposed in the section is called “Diagonal matrix based User Selection (DUS)”. Because it is unnecessary to obtain the normalization factor for all the possible combinations, the complexity of the DUS can be less than that of the NUS.
3.3 Correlation matrix based user selection (CUS)
As is shown in (9), the modulo function keeps the feedback filter
output signal amplitude within half of the modulo Md. If the modulus
Md is set to the infinity, however, the THP will be reduced to the
linear MMSE precoding, and the power of the feedback filter output
signals will be increased. Because the linear filter output vector
In the above, the power of the modulation signals
3.4 Successive user selection
Although the reduced complexity user selection techniques, such
as the DUS and the CUS, have been proposed, they require the
exhaustive search to find the user terminal set. Because the number of
the possible user terminal combinations is
In the section, we propose successive user selection techniques
based on the user selection techniques proposed in the previous
sections in order to reduce the complexity caused by the exhaustive
search. The proposed successive user selection technique selects only
the user terminal at once that maximizes the metric, which is repeated
to find the NAP user terminals. Because only one user terminal is
searched with the exhaustive search, the complexity of the selection is
reduced to that proportional to
3.4.1 Successive NUS (SNUS)
Successive user selection based on the NUS selects a user terminal based on the amplitude of the received signal. Let n - 1 terminals have been selected before by the technique, the selection technique find a user that satisfies the following equation.
In (22),
3.4.2 Successive DUS (SDUS)
Similar to the SNUS, only the user terminal is selected that maximizes the metric used in the DUS as,
This user terminal selection technique is called “Successive NUS”.
3.4.3 Successive CUS (SCUS)
A successive user selection technique based on CUS is also defined as follows.
This user terminal selection is called “Successive CUS (SCUS)”.
4. Computer Simulation
The performance of the proposed user selection techniques is
evaluated in wireless multiuser communication environment drawn
in Figure 1 by computer simulation. Rayleigh fading based on Jakes’
model is applied, because our proposed techniques are assume to be
applied to mobile communication systems [16]. Modulation scheme
is fixed to the quaternary phase shift keying (QPSK);

4.1 BER Performance
Figure 2 compares the user selection techniques proposed in this paper with the CDUS in terms of the BER performance. In addition, the BER performance of the random selection is added as a reference. The number of the terminals is set to 10. Horizontal axis is Eb/N0. Although the CDUS achieves better performance than the random selection, the performance of the CDUS is about 4dB inferior to that of the NUS. The performance of the NUS is almost the same to that of the CUS and the DUS. Exactly speaking, the DUS achieves a little bit better performance than the NUS and the CUS, especially in the region of the BER less than 10-5.
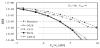
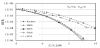
Figure 3 also shows the BER performance of the successive selection algorithms. The number of the user terminals is also 10. Similar as the performance shown in Figure 2, there is a big gap between the user selection techniques proposed in the paper and the others. However, the performance of the successive selection techniques is slightly degraded from that of their original techniques. For example, the performance of the SDUS is about 0.5dB worse than that of the DUS at the BER of 10-6.
4.2 Frequency utilization efficiency
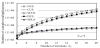
The frequency utilization efficiency of the proposed user terminal selection techniques is evaluated with respect to the number of the terminals. Because the successive user terminal selection techniques achieve similar performance as their original selection techniques as is shown in Sec. IV-A, only the performance of the original selection techniques is shown in Figure 4, where the performance of the random selection and the CDUS are drawn for comparison. Eb/N0 is 6.64 dB. The performance of the random selection technique is independent of the number of the terminals. On the other hand, the performance of the other user terminal selection techniques is improved as the number of the terminals increases, because the probability that the user terminal sets are situated in more favourable conditions rises as the number of the terminals increases. As is shown in the figure, the frequency utilization efficiency of the DUS is much higher than that of the CDUS. This means that the DUS selects more favourable combinations than the CDUS, which agrees with the performance shown previously. The DUS achieves 160% higher utilization efficiency that the CDUS, and about 260% higher utilization efficiency that that of the random selection, when the number of the terminals is 10.
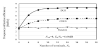
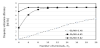
Figure 5 shows the frequency utilization efficiency of the DUS with respect to the number of the terminals. As is shown in this figure, the frequency utilization efficiency is rapidly saturated at 8 bit/Hz as the number of the user terminals increases, when Eb/N0 is high. When Eb/N0 is low, the frequency utilization efficiency is gradually going up as the number of the terminals increases.
4.3 Complexity
The complexity of the proposed user terminal selection is shown in
Figure 6. While the horizontal axis means the number of the terminals,
the vertical axis is the number of the complex multiplications
performed per packet. The NUS has the higher computational
complexity in spite of the number of the terminals. Though the
complexity of the DUS and the CUS is less than that of the NUS, the
complexity grows in parallel with the NUS, because the complexity of
those two techniques is proportional to
5. Conclusion
This paper has proposed novel user selection techniques for the Tomlinson-Harashima precoding based on the MMSE criterion with ordering. Those techniques are named NUS, DUS and CUS, respectively. While the NUS requires the THP weights for all the possible combinations of the user terminals to select the user terminals, the DUS and the CUS do not need the THP weights. Therefore, the DUS and the CUS can be implemented with less computational complexity than the NUS. Furthermore, this paper proposes further low complexity user terminal selection techniques that select the user terminals, successfully. The performance of the proposed user terminal selection techniques is evaluated by computer simulations. As a result, the DUS achieves slightly better BER performance than the others, and about 6dB better performance than the CDUS, a representative of conventional techniques. The SDUS is only 0.5 dB inferior to the DUS. However, the complexity of the SDUS is about 1/200 as small as that of the DUS.
6. Appendix A
6.1 Chordal Distance User Selection
Chordal distance user selection (CDUS) uses the chordal distance as a selection criterion [17], which is defined in the following equation.
In (25),
As is done in the proposed successive user selection techniques, the terminal that satisfies the above requirement is selected, and the user terminal index is added to the previously selected user terminal set.
Competing Interests
The authors declare that they have no competing interests.