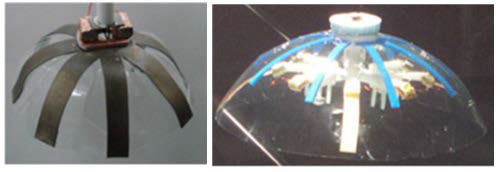
Figure 17:
Jellyfish-like swimming robot utilizing IPMC (a) developed by Oh et al.
[40]
, (b) developed by Joseph et al.
[41]
.