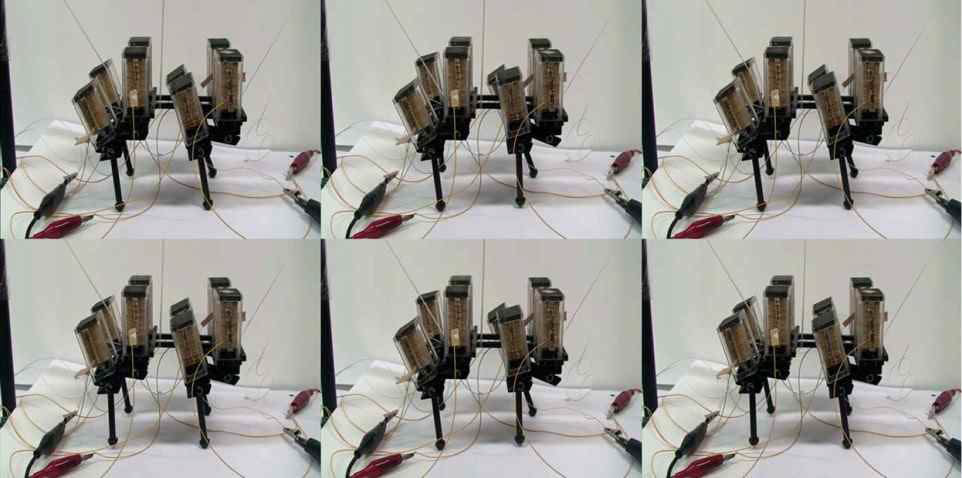
Figure 13:
Demonstration of the walking motion of the legged robot
[31]
.