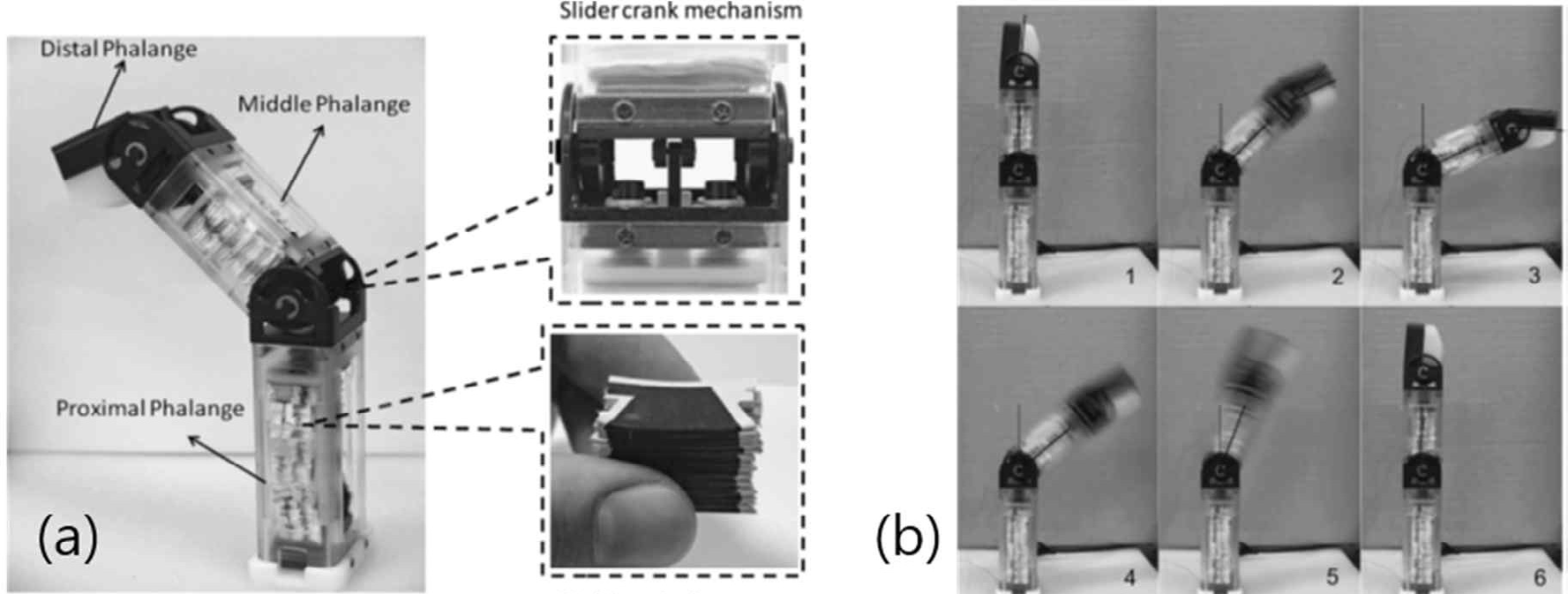
Figure 12:
Prototype of multi-joint robot finger using a multi-stacked dielectric elastomer actuator
[30]
; (a) photograph, (b) demonstration of the movement (solid line: initial; dotted line: moved position).