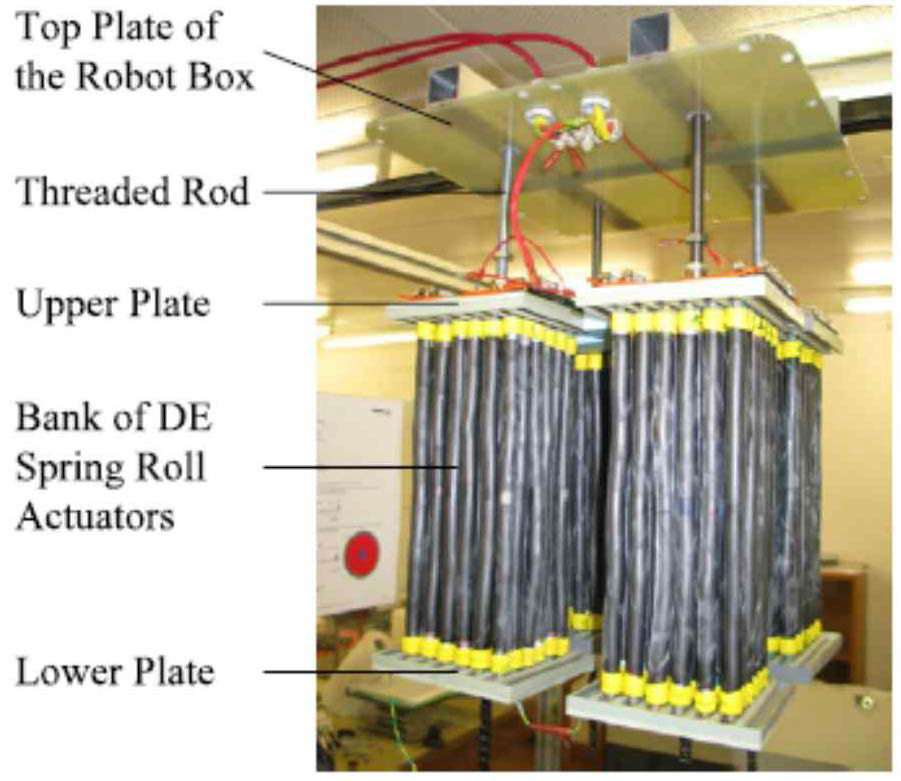
Figure 10:
The four actuator-banks placed inside the arm wrestling robot
[26]
.