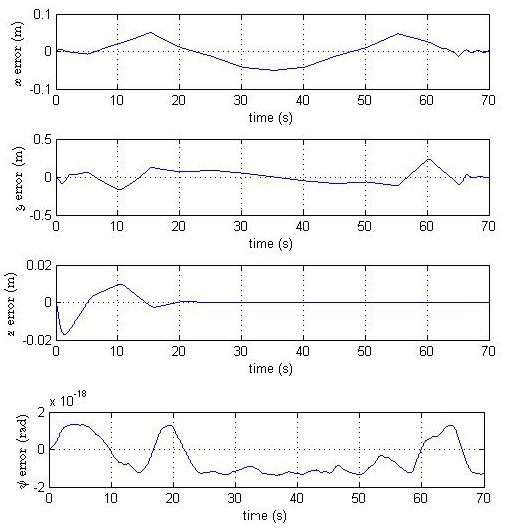
Figure 4.2:
Tracking errors of the position and yaw.