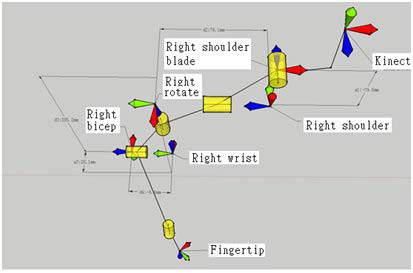
Figure 2:
The coordinate frame assignment for the robot arm.